En este artículo, vamos a resolver un problema clásico de estática, donde calculamos el momento de una fuerza con respecto a un punto dado. Este tipo de ejercicios es fundamental en la mecánica de sólidos y se aplica en el análisis estructural de vigas y otros elementos sometidos a fuerzas.
Planteamiento del Problema
La fuerza  actúa en el extremo de una viga en el espacio tridimensional. Debemos calcular el momento de la fuerza con respecto al punto
actúa en el extremo de una viga en el espacio tridimensional. Debemos calcular el momento de la fuerza con respecto al punto  . Este tipo de problemas se resuelve aplicando el producto vectorial entre el vector posición y la fuerza aplicada.
. Este tipo de problemas se resuelve aplicando el producto vectorial entre el vector posición y la fuerza aplicada.
Cálculo del Momento de la Fuerza
El primer paso es determinar el vector de posición entre los puntos y  .
.
El vector posición es:  .
.
Ahora, calculamos el producto cruzado entre  y
y  :
:
![\[ \vec{M}_A = \vec{r}_{AB} \times \vec{F} = (-720 \hat{i} + 120 \hat{j} - 660 \hat{k}) \, N \cdot m \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-9e41794cd6c4556fb31f5c61a2b0a085_l3.svg "Rendered by QuickLaTeX.com")
Así, el momento de la fuerza con respecto al punto  es
es  .
.
Interpretación y Aplicación
El resultado obtenido es importante en el análisis estructural, ya que nos permite conocer la tendencia de rotación que produce una fuerza aplicada en una estructura. Este ejercicio es muy común en cursos de mecánica de sólidos y es fundamental para comprender cómo las fuerzas afectan a las estructuras.
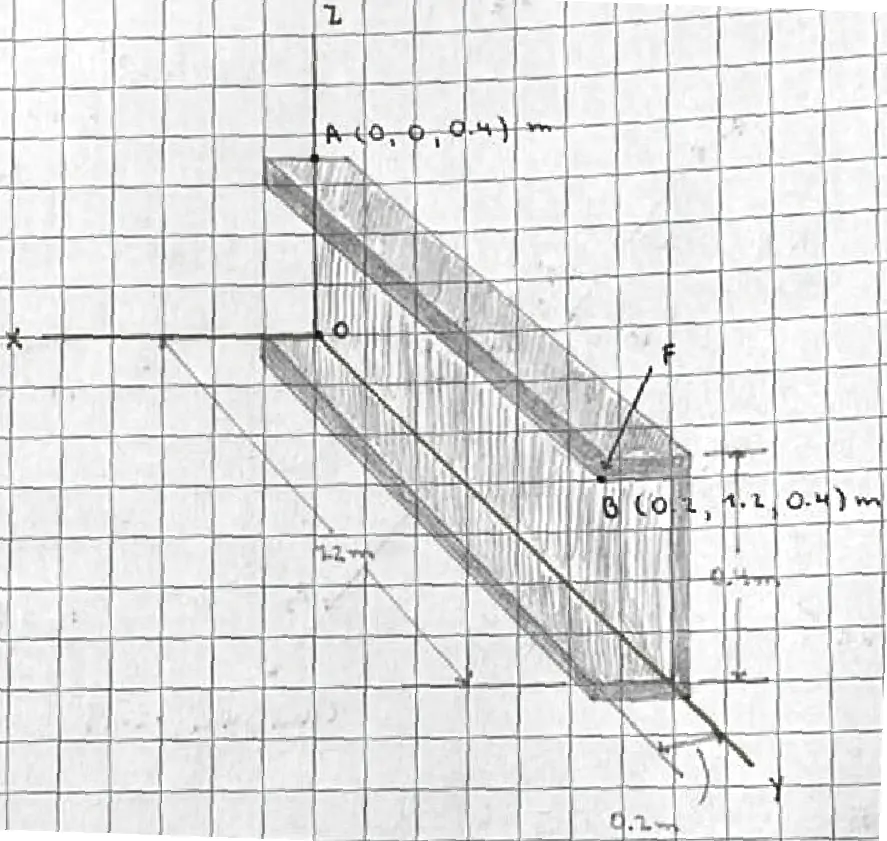
Cálculo del Momento de la Fuerza
El primer paso es determinar el vector de posición entre los puntos y .
El vector posición es:
![\[ \vec{r}_{AB} = (B - A) = (0.2 \hat{i} + 1.2 \hat{j} + (0.4 - 0.4) \hat{k}) = (0.2 \hat{i} + 1.2 \hat{j}) \, m \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-c84982555665dc1ee2f394d57cc8b3c8_l3.svg "Rendered by QuickLaTeX.com")
Ahora, tenemos que calcular el producto cruzado entre el vector posición y la fuerza .
Sabemos que la fuerza es:
![\[ \vec{F} = 600 \hat{i} + 300 \hat{j} - 600 \hat{k} \, N \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-dc9e5dbdafee5ec85a4302e05e48539e_l3.svg "Rendered by QuickLaTeX.com")
El momento de la fuerza respecto al punto se calcula como:
![\[ \vec{M}_A = \vec{r}_{AB} \times \vec{F} \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-351416400330d5b5df4391fd4e4188ae_l3.svg "Rendered by QuickLaTeX.com")
Cálculo del Producto Cruzado
Para calcular el producto cruzado entre y  , desglosamos el cálculo:
, desglosamos el cálculo:
![\[ \vec{M}_A = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 0.2 & 1.2 & 0 \\ 600 & 300 & -600 \end{vmatrix} \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-e7f9e34d6ccc830c3c00a84d753a89f6_l3.svg "Rendered by QuickLaTeX.com")
Calculamos el determinante por componentes:
– Componente :
: ![\[ M_A^i = (1.2)(-600) - (0)(300) = -720 \, N \cdot m \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-2475a1d3ad4b3a87c2f02fe5695ee59e_l3.svg "Rendered by QuickLaTeX.com")
 :
: ![\[ M_A^j = (0)(600) - (0.2)(-600) = 120 \, N \cdot m \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-02da96a15f33ad4f5db5f140f12384a8_l3.svg "Rendered by QuickLaTeX.com")
 :
: ![\[ M_A^k = (0.2)(300) - (1.2)(600) = -660 \, N \cdot m \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-116bad2ca74f279a9fed6eda79b303ad_l3.svg "Rendered by QuickLaTeX.com")
Por lo tanto, el momento de la fuerza es:
![\[ \vec{M}_A = (-720 \hat{i} + 120 \hat{j} - 660 \hat{k}) \, N \cdot m \]](https://mathsalomon.com/wp-content/ql-cache/quicklatex.com-1f9156320d83481c1ea0fe7dbee8caaf_l3.svg "Rendered by QuickLaTeX.com")
Así, el momento de la fuerza con respecto al punto es:
Fórmulas y Teoremas Clave
1. Leyes de Newton
Primera Ley de Newton (Ley de la Inercia): Un cuerpo permanece en reposo o en movimiento rectilíneo uniforme si la suma de las fuerzas que actúan sobre él es cero.
Segunda Ley de Newton (Ley de la Aceleración): La aceleración de un objeto es directamente proporcional a la fuerza neta aplicada e inversamente proporcional a su masa. 
Tercera Ley de Newton (Acción y Reacción): A cada acción corresponde una reacción de igual magnitud y dirección opuesta.
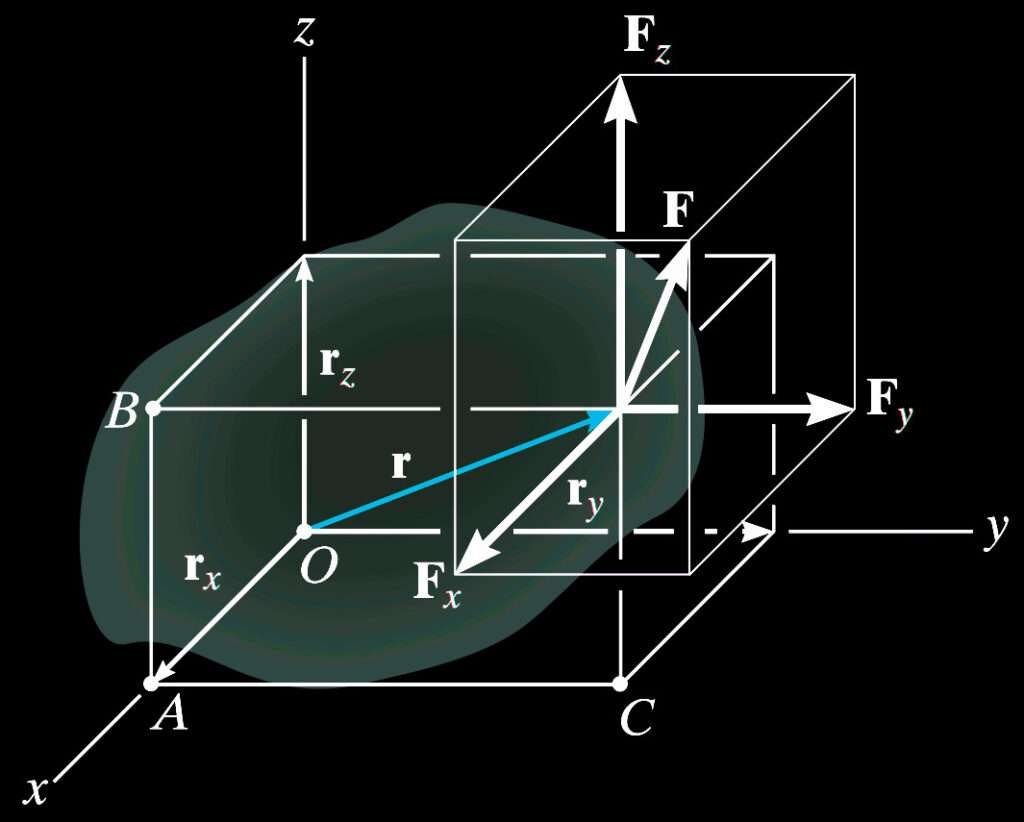
2. Momento de una Fuerza

Fórmula:  , donde
, donde  es el vector de posición y es el vector fuerza.
es el vector de posición y es el vector fuerza.
3. Producto Vectorial
Fórmula básica:  , donde
, donde  es el ángulo entre los vectores y
es el ángulo entre los vectores y  , y
, y  es un vector unitario perpendicular al plano que contiene a y .
es un vector unitario perpendicular al plano que contiene a y .
Fórmula usando una determinante:

Donde  ,
,  ,
,  son las componentes del vector
son las componentes del vector  y
y  ,
,  ,
,  son las componentes del vector
son las componentes del vector  .
.
4. Teorema de Pitágoras en 3D
Fórmula:  , donde
, donde  ,
,  , y
, y  son las componentes del vector de posición en los ejes
son las componentes del vector de posición en los ejes  ,
,  , y
, y  .
.
5. Ley de los Senos y Cosenos
Ley de los Senos: 
Ley de los Cosenos: 